Gravity with Simscape Models
Table of Contents
We would like to include gravity in a Simscape multi-body model while starting the simulation at the equilibrium.
The basic idea is to first perform a simulation of the system until it goes at it rest position and save the rest position forces and deflection in each joint.
We can then think of three solutions to start a new simulation directly at the steady state position:
- Change the equilibrium position \(l_0\) of each joint such that at \(t=0\), \(k \times l_0\) is equal to the previously measured force in the joint. Here, it is suppose that we constrain the initial position of the joint to be equal to zero. Then, these forces cancel each other and the simulation starts at equilibrium.
- Add an External force (or maybe the “Internal Force”) in the direction of the joint (the “resolution frame” is fixed to the solids) equal to the opposite of the previously measured force.
- After the first simulation, measure the final change of position of each joint, then set the initial position to be the measured static position. Then, the simulation will start at equilibrium, but all the elements will be “deflected”.
The three solutions are tested below.
1 Simulink
open 'gravity_test.slx'
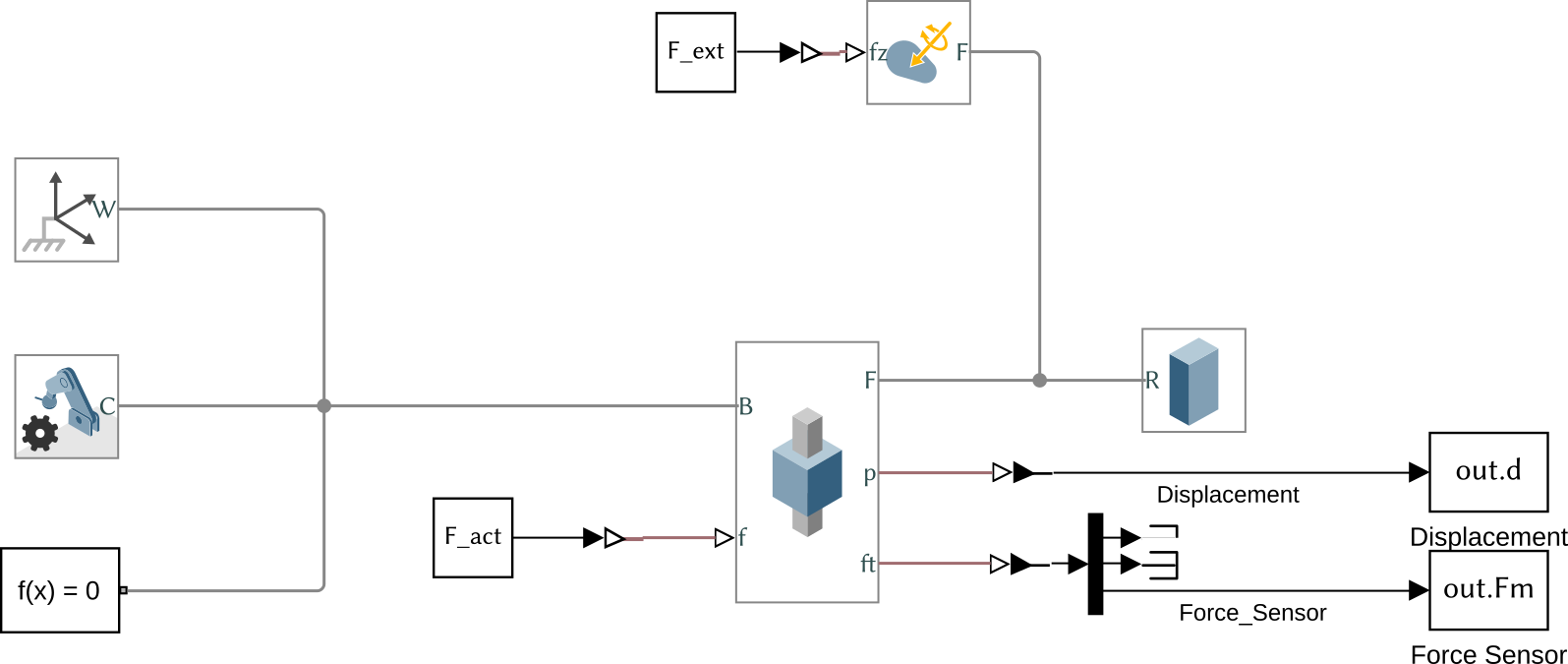
Figure 1: Simscape model used for the simulations
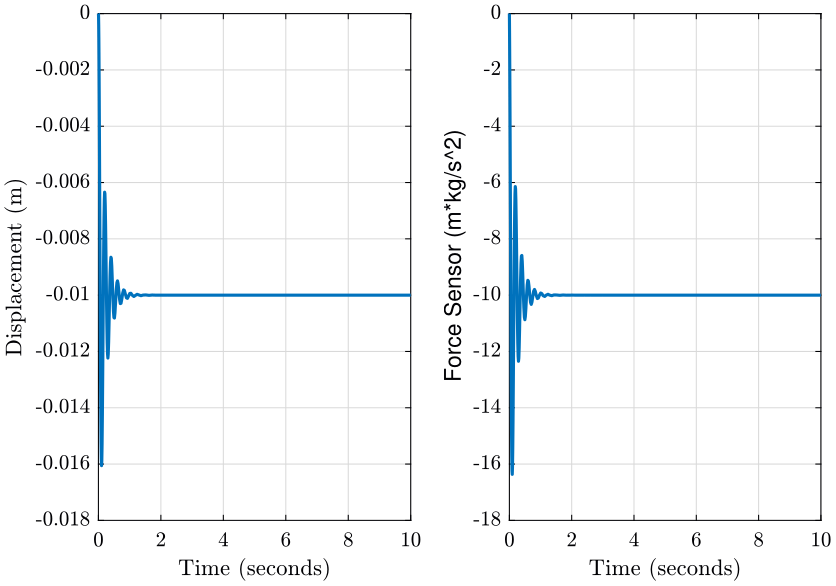
2 Initial Simulation
g = -10; % [m/s^2] k = 1e3; % Stiffness [N/m] c = 10; % Damping [N/(m/s)] l0 = 0; % Initial wanted position [m] leq = 0; % equilibrium position [m] F_ext = 0; % External force [N] F_act = 0; % Actuator force [N]
out_init = sim('gravity_test.slx') out_init.d.Name = 'Displacement'; out_init.Fm.Name = 'Force Sensor';
figure; subplot(1,2,1) plot(out_init.d) title(''); subplot(1,2,2) plot(out_init.Fm) title('');
<<plt-matlab>>
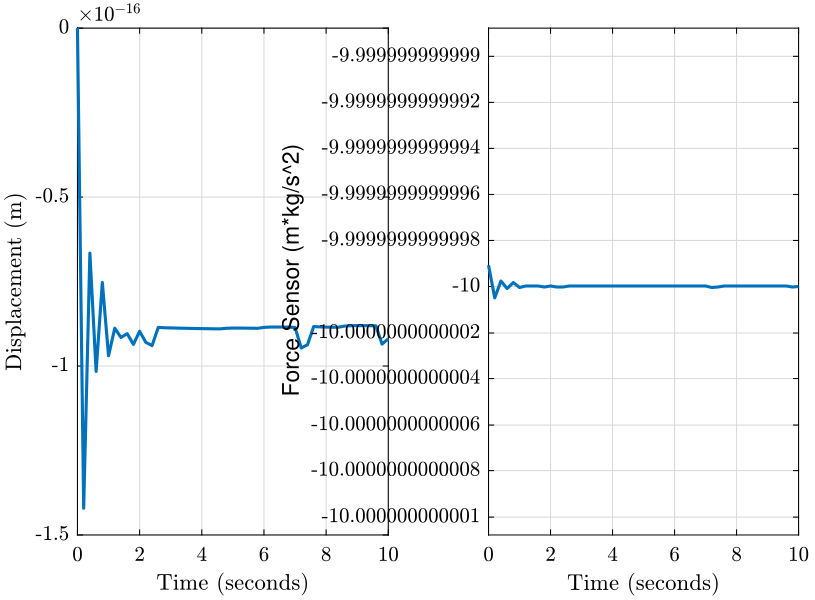
3 Change the equilibrium position
l0 = 0; % Initial wanted position [m] leq = -out_init.Fm.Data(end)/k; % equilibrium position [m] F_ext = 0; % External force [N] F_act = 0; % Actuator force [N]
out = sim('gravity_test.slx'); out.d.Name = 'Displacement'; out.Fm.Name = 'Force Sensor';
figure; subplot(1,2,1) plot(out.d) title(''); subplot(1,2,2) plot(out.Fm) title('');
<<plt-matlab>>
4 Add external force
l0 = 0; % Initial wanted position [m] leq = 0; % equilibrium position [m] F_ext = -out_init.Fm.Data(end); % External force [N] F_act = 0; % Actuator force [N]
out = sim('gravity_test.slx'); out.d.Name = 'Displacement'; out.Fm.Name = 'Force Sensor';
figure; subplot(1,2,1) plot(out.d) title(''); subplot(1,2,2) plot(out.Fm) title('');
<<plt-matlab>>

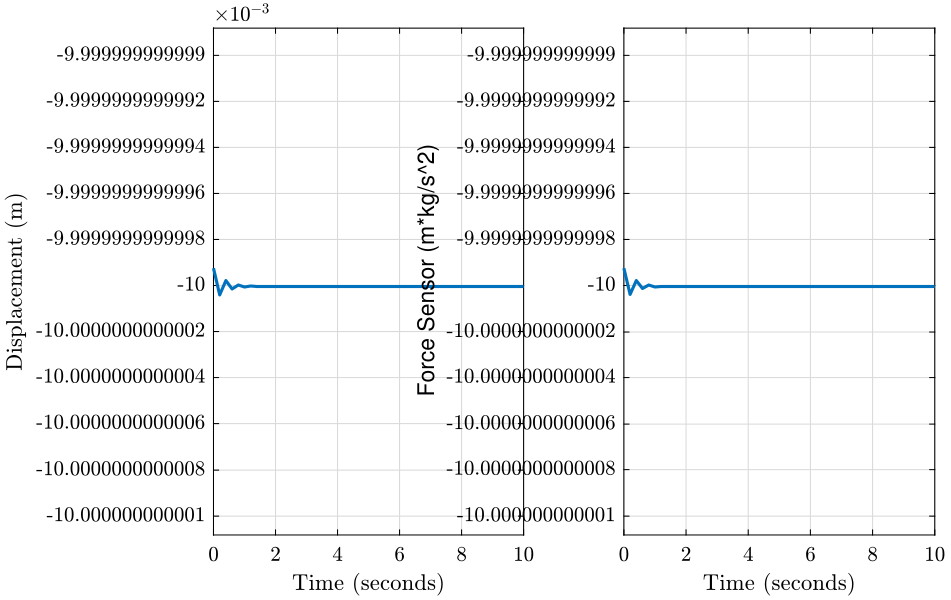
5 Change initial position
l0 = out_init.d.Data(end); % Initial wanted position [m] leq = 0; % equilibrium position [m] F_ext = 0; % External force [N] F_act = 0; % Actuator force [N]
out = sim('gravity_test.slx'); out.d.Name = 'Displacement'; out.Fm.Name = 'Force Sensor';
figure; subplot(1,2,1) plot(out.d) title(''); subplot(1,2,2) plot(out.Fm) title('');
<<plt-matlab>>
{kind=link}
{kind=link}
{kind=link}
{kind=link}
6 Conclusion
Three techniques:
- Change the equilibrium position
- This does not change the equilibrium position of the system
- Add external force
- May not be physical
- Change the initial position
- The static position is not the same as the static position without gravity
- Very easy to implement
Changing the equilibrium position of each joint seem the most practical solution.