Bank of Linear Filters - Matlab
Table of Contents
1 Low Pass
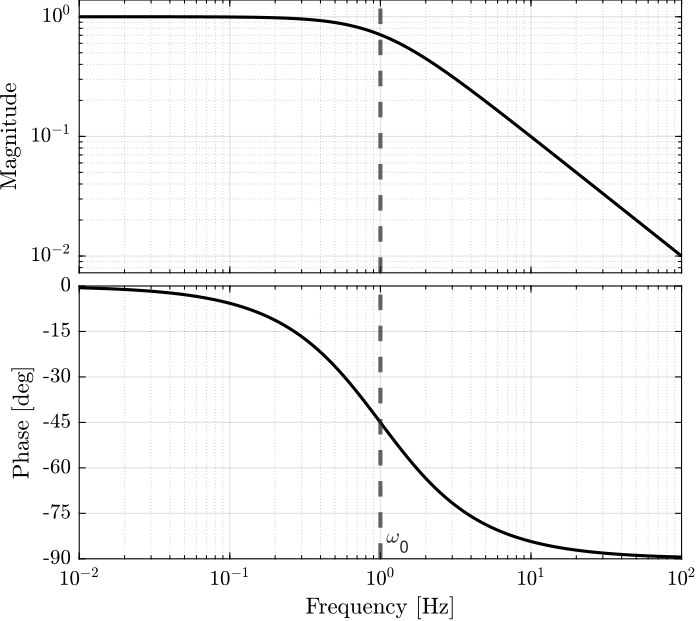
1.1 First Order Low Pass Filter
\[ H(s) = \frac{1}{1 + s/\omega_0} \]
Parameters:
- \(\omega_0\): cut-off frequency in [rad/s]
Characteristics:
- Low frequency gain of \(1\)
- Roll-off equals to -20 dB/dec
Matlab code:
w0 = 2*pi; % Cut-off Frequency [rad/s] H = 1/(1 + s/w0);
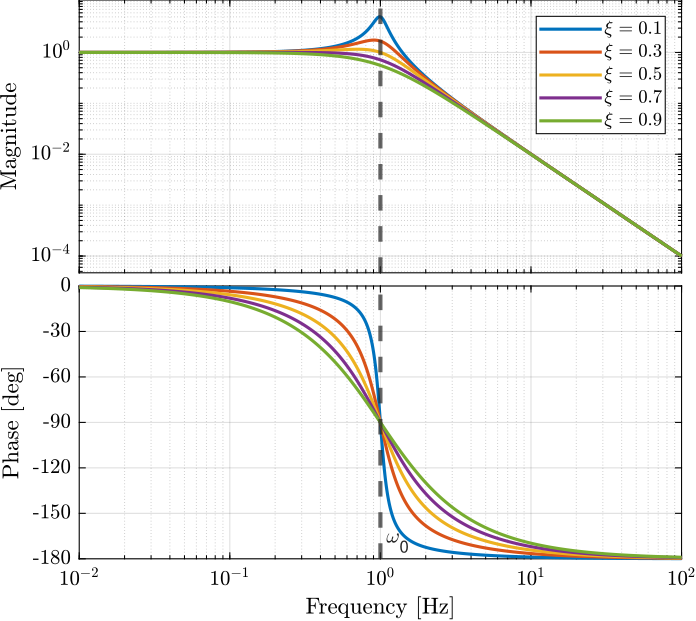
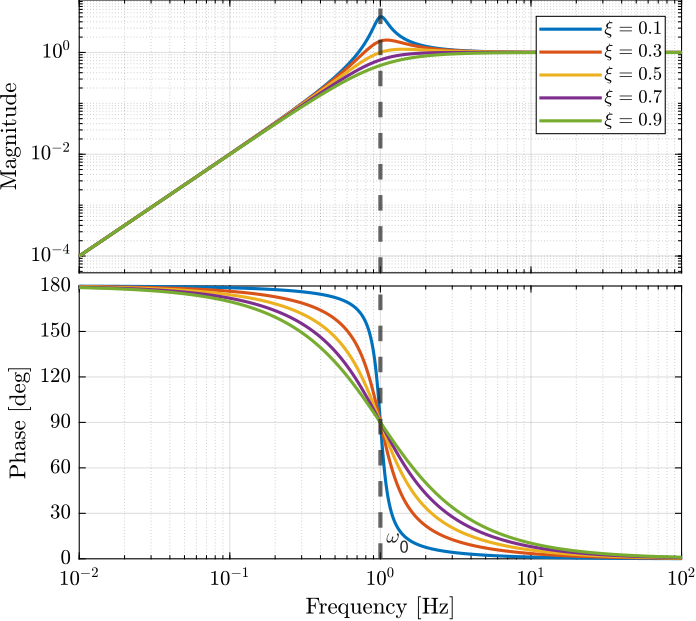
1.2 Second Order
\[ H(s) = \frac{1}{1 + 2 \xi / \omega_0 s + s^2/\omega_0^2} \]
Parameters:
- \(\omega_0\):
- \(\xi\): Damping ratio
Characteristics:
- Low frequency gain: 1
- High frequency roll off: - 40 dB/dec
Matlab code:
w0 = 2*pi; % Cut-off frequency [rad/s] xi = 0.3; % Damping Ratio H = 1/(1 + 2*xi/w0*s + s^2/w0^2);
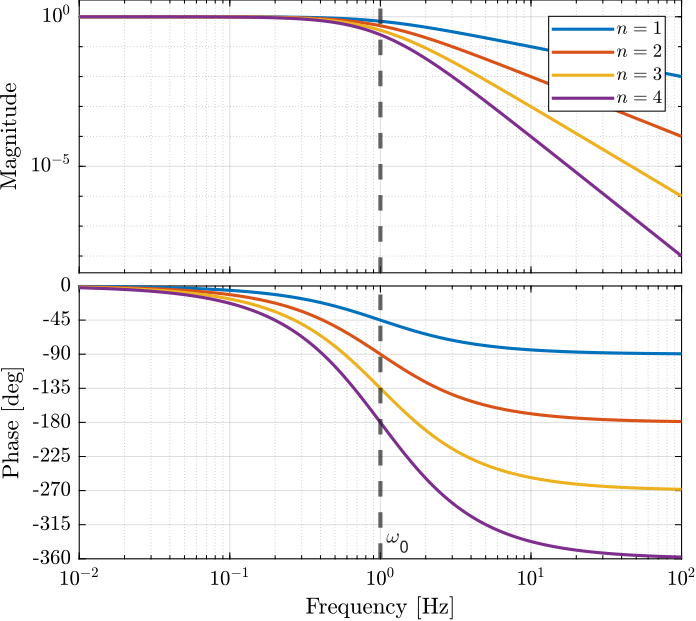
1.3 Combine multiple first order filters
\[ H(s) = \left( \frac{1}{1 + s/\omega_0} \right)^n \]
Matlab code:
w0 = 2*pi; % Cut-off frequency [rad/s] n = 3; % Filter order H = (1/(1 + s/w0))^n;
2 High Pass
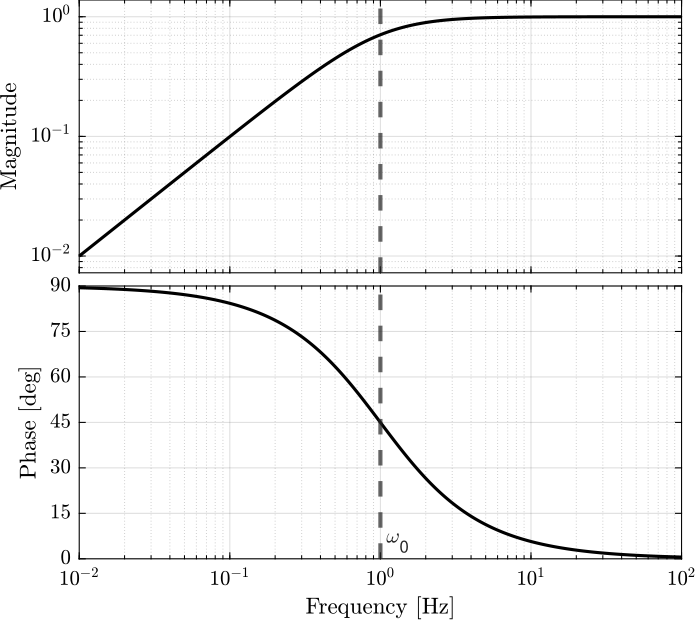
2.1 First Order
\[ H(s) = \frac{s/\omega_0}{1 + s/\omega_0} \]
Parameters:
- \(\omega_0\): cut-off frequency in [rad/s]
Characteristics:
- High frequency gain of \(1\)
- Low frequency slow of +20 dB/dec
Matlab code:
w0 = 2*pi; % Cut-off frequency [rad/s] H = (s/w0)/(1 + s/w0);
2.2 Second Order
\[ H(s) = \frac{s^2/\omega_0^2}{1 + 2 \xi / \omega_0 s + s^2/\omega_0^2} \]
Parameters:
- \(\omega_0\):
- \(\xi\): Damping ratio
Matlab code:
w0 = 2*pi; % [rad/s] xi = 0.3; H = (s^2/w0^2)/(1 + 2*xi/w0*s + s^2/w0^2);
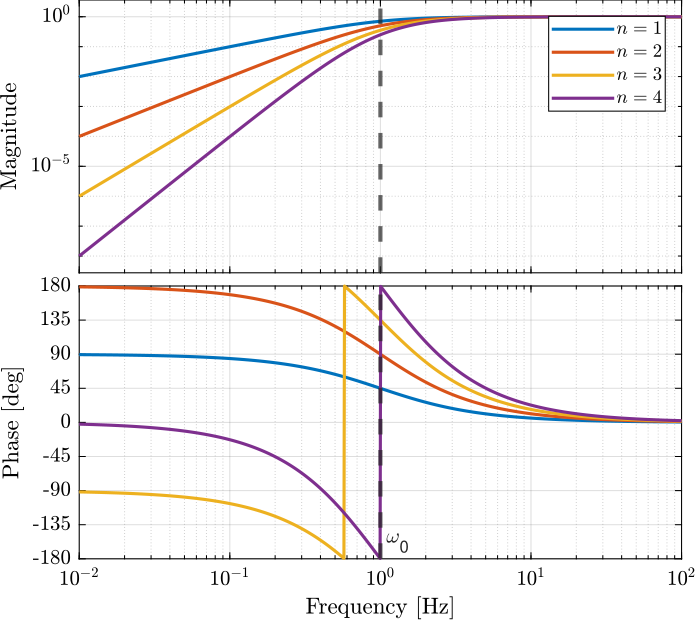
2.3 Combine multiple filters
\[ H(s) = \left( \frac{s/\omega_0}{1 + s/\omega_0} \right)^n \]
Matlab code:
w0 = 2*pi; % [rad/s] n = 3; H = ((s/w0)/(1 + s/w0))^n;
3 Band Pass
3.1 Second Order
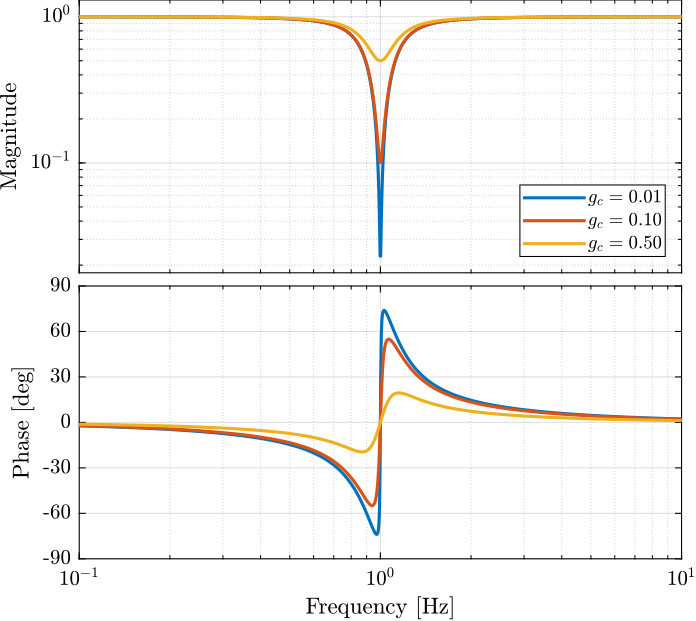
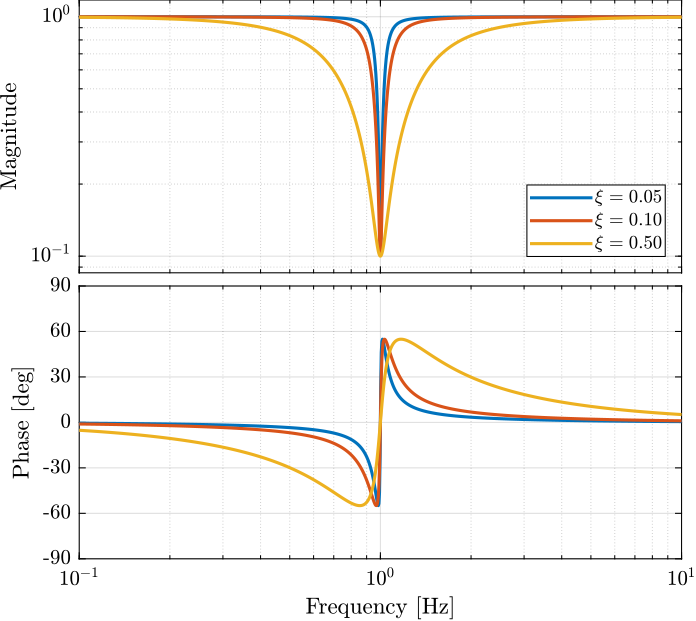
4 Notch
4.1 Second Order
Parameters:
- \(\omega_n\): frequency of the notch
- \(g_c\): gain at the notch frequency
- \(\xi\): damping ratio (notch width)
Matlab code:
gc = 0.02; xi = 0.1; wn = 2*pi; H = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
5 Chebyshev
5.1 Chebyshev Type I
n = 4; % Order of the filter Rp = 3; % Maximum peak-to-peak ripple [dB] Wp = 2*pi; % passband-edge frequency [rad/s] [A,B,C,D] = cheby1(n, Rp, Wp, 'high', 's'); H = ss(A, B, C, D);
6 Lead - Lag
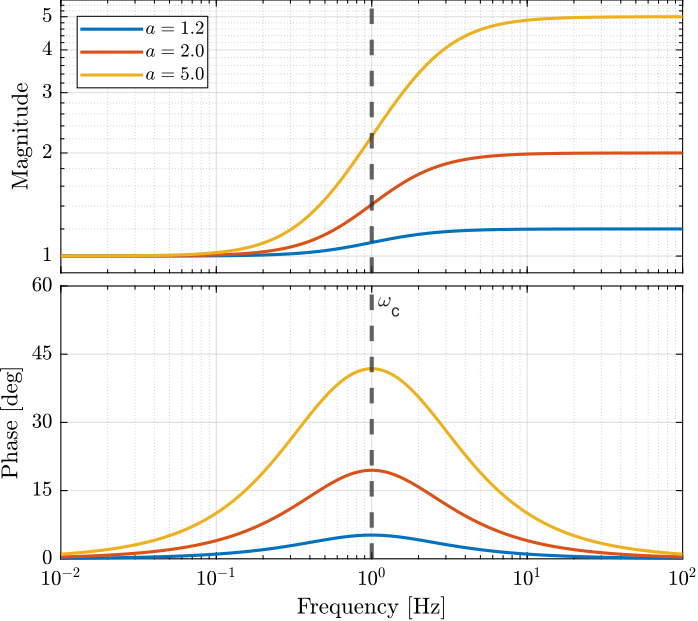
6.1 Lead
Parameters:
- \(\omega_c\): frequency at which the phase lead is maximum
- \(a\): parameter to adjust the phase lead, also impacts the high frequency gain
Characteristics:
- the low frequency gain is \(1\)
- the high frequency gain is \(a\)
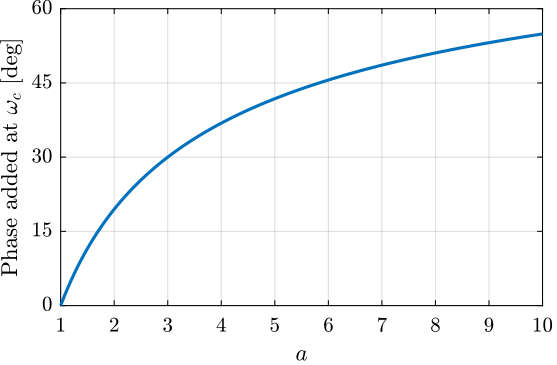
- the phase lead at \(\omega_c\) is equal to (Figure 10): \[ \angle H(j\omega_c) = \tan^{-1}(\sqrt{a}) - \tan^{-1}(1/\sqrt{a}) \]
Matlab code:
a = 0.6; % Amount of phase lead / width of the phase lead / high frequency gain wc = 2*pi; % Frequency with the maximum phase lead [rad/s] H = (1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
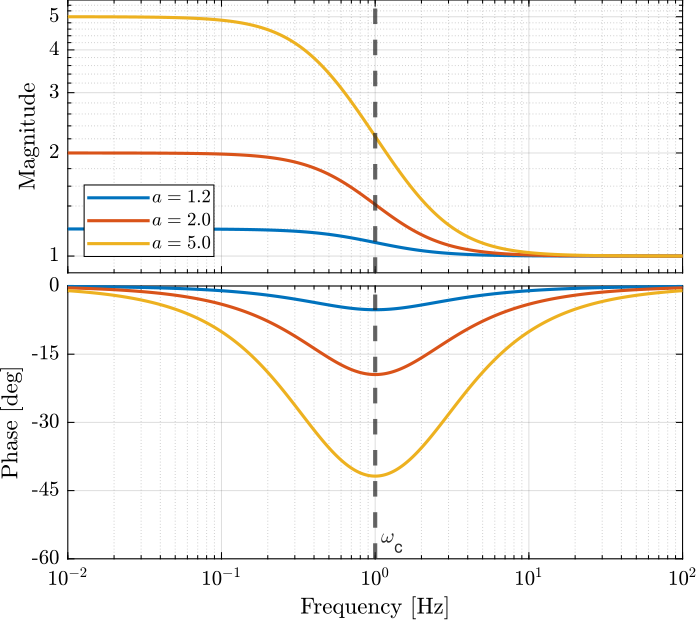
6.2 Lag
Parameters:
- \(\omega_c\): frequency at which the phase lag is maximum
- \(a\): parameter to adjust the phase lag, also impacts the low frequency gain
Characteristics:
- the low frequency gain is increased by a factor \(a\)
- the high frequency gain is \(1\) (unchanged)
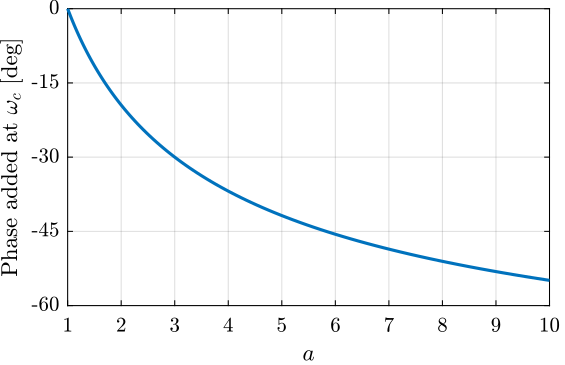
- the phase lag at \(\omega_c\) is equal to (Figure 12): \[ \angle H(j\omega_c) = \tan^{-1}(1/\sqrt{a}) - \tan^{-1}(\sqrt{a}) \]
Matlab code:
a = 0.6; % Amount of phase lag / width of the phase lag / high frequency gain wc = 2*pi; % Frequency with the maximum phase lag [rad/s] H = (wc*sqrt(a) + s)/(wc/sqrt(a) + s);
7 Complementary
8 Performance Weight
8.1 Nice combination
n = 2; w0 = 2*pi*11; G0 = 1/10; G1 = 1000; Gc = 1/2; wL = Gc*(((G1/Gc)^(1/n)/w0*sqrt((1-(G0/Gc)^(2/n))/((G1/Gc)^(2/n)-1))*s + (G0/Gc)^(1/n))/(1/w0*sqrt((1-(G0/Gc)^(2/n))/((G1/Gc)^(2/n)-1))*s + 1))^n; n = 3; w0 = 2*pi*9; G0 = 10000; G1 = 0.1; Gc = 1/2; wH = Gc*(((G1/Gc)^(1/n)/w0*sqrt((1-(G0/Gc)^(2/n))/((G1/Gc)^(2/n)-1))*s + (G0/Gc)^(1/n))/(1/w0*sqrt((1-(G0/Gc)^(2/n))/((G1/Gc)^(2/n)-1))*s + 1))^n;
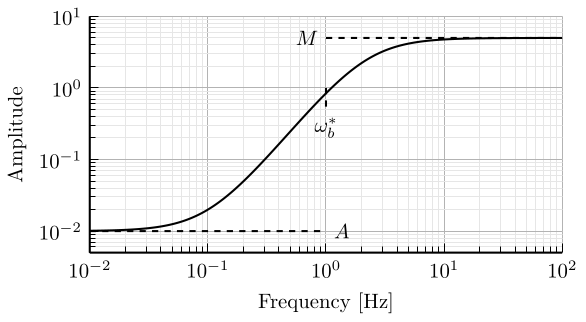
8.2 Alternative
w0 = 2*pi; % [rad/s] A = 1e-2; M = 5; H = (s/sqrt(M) + w0)^2/(s + w0*sqrt(A))^2;
9 Combine Filters
9.1 Additive
[ ]Explain how phase and magnitude combine
9.2 Multiplicative
10 Filters representing noise
Let’s consider a noise \(n\) that is shaped from a white-noise \(\tilde{n}\) with unitary PSD (\(\Phi_\tilde{n}(\omega) = 1\)) using a transfer function \(G(s)\). The PSD of \(n\) is then: \[ \Phi_n(\omega) = |G(j\omega)|^2 \Phi_{\tilde{n}}(\omega) = |G(j\omega)|^2 \]
The PSD \(\Phi_n(\omega)\) is expressed in \(\text{unit}^2/\text{Hz}\).
And the root mean square (RMS) of \(n(t)\) is: \[ \sigma_n = \sqrt{\int_{0}^{\infty} \Phi_n(\omega) d\omega} \]
10.1 First Order Low Pass Filter
\[ G(s) = \frac{g_0}{1 + \frac{s}{\omega_c}} \]
g0 = 1; % Noise Density in unit/sqrt(Hz) wc = 1; % Cut-Off frequency [rad/s] G = g0/(1 + s/wc); % Frequency vector [Hz] freqs = logspace(-3, 3, 1000); % PSD of n in [unit^2/Hz] Phi_n = abs(squeeze(freqresp(G, freqs, 'Hz'))).^2; % RMS value of n in [unit, rms] sigma_n = sqrt(trapz(freqs, Phi_n))
\[ \sigma = \frac{1}{2} g_0 \sqrt{\omega_c} \] with:
- \(g_0\) the Noise Density of \(n\) in \(\text{unit}/\sqrt{Hz}\)
- \(\omega_c\) the bandwidth over which the noise is located, in rad/s
- \(\sigma\) the rms noise
If the cut-off frequency is to be expressed in Hz: \[ \sigma = \frac{1}{2} g_0 \sqrt{2\pi f_c} = \sqrt{\frac{\pi}{2}} g_0 \sqrt{f_c} \]
Thus, if a sensor is said to have a RMS noise of \(\sigma = 10 nm\ rms\) over a bandwidth of \(\omega_c = 100 rad/s\), we can estimated the noise density of the sensor to be (supposing a first order low pass filter noise shape): \[ g_0 = \frac{2 \sigma}{\sqrt{\omega_c}} \quad \left[ m/\sqrt{Hz} \right] \]
2*10e-9/sqrt(100)
2e-09
6*0.5*20e-12*sqrt(2*pi*100)
1.504e-09